Extending the capabilities of robotic manipulators using trajectory optimization Laboratoire de robotique de l'université Laval / Laval University Robotics Laboratory 4:59 6 years ago 1 020 Скачать Далее
Efficient Trajectory Optimization for Robot Motion Planning Yu Zhao 0:54 5 years ago 2 613 Скачать Далее
Control and Trajectory Optimization for Soft Aerial Manipulation MIT SPARK Lab 1:22 4 years ago 2 164 Скачать Далее
CROPS Manipulator (Generation 1) - Trajectory Optimization by a Direct Method TUM Chair of Applied Mechanics 1:00 9 years ago 172 Скачать Далее
Deep Learning In Robotics || Smart Robotics || ~xRay Pixy Ritika xRay Pixy 14:57 1 day ago 76 Скачать Далее
Contact-Implicit Trajectory Optimization with Hydroelastic Contact and iLQR Notre Dame Robotics 1:00 2 years ago 622 Скачать Далее
Trajectory Optimization with Implicit Hard Contacts Robotic Systems Lab: Legged Robotics at ETH Zürich 1:09 6 years ago 1 542 Скачать Далее
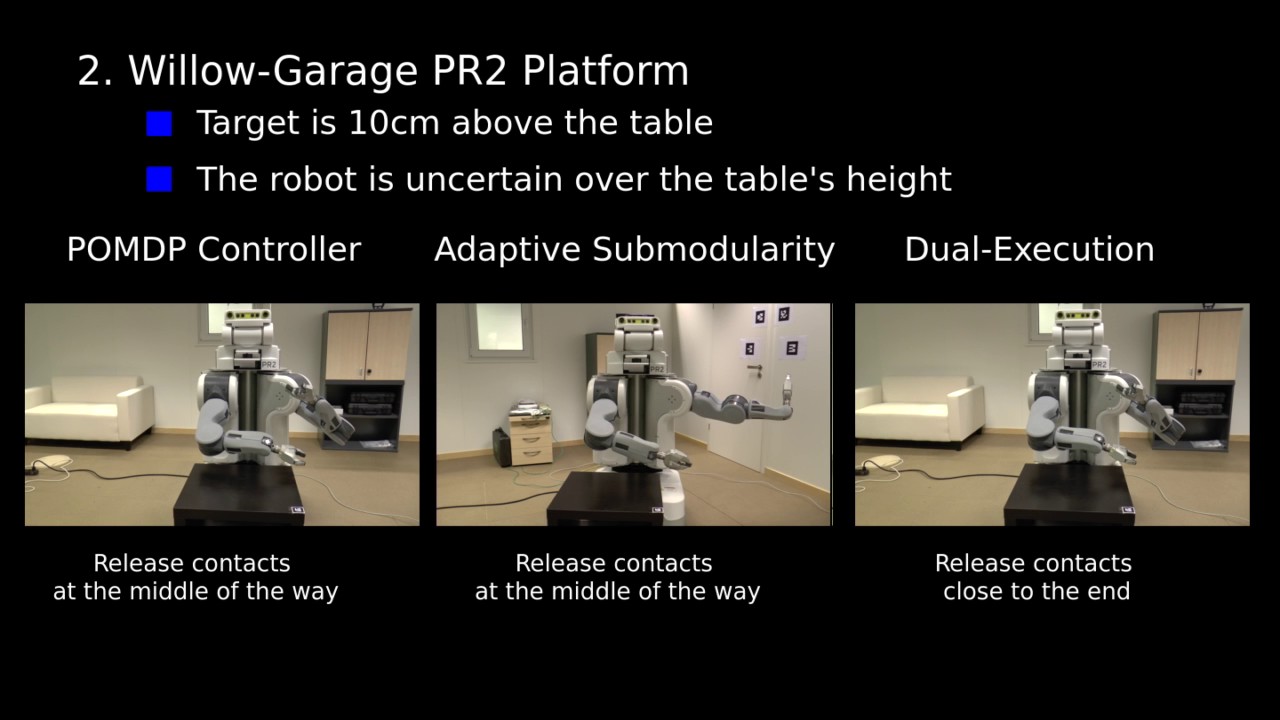
POMDP Manipulation via Trajectory Optimization Learning and Intelligent Systems Lab, TU Berlin 1:10 7 years ago 543 Скачать Далее
RSS 2020, Spotlight Talk 33: Manipulation Trajectory Optimization with Online Grasp Synthesis and... Robotics Science and Systems 5:05 4 years ago 1 036 Скачать Далее
Trajectory optimization of robots through contact Robot Locomotion Group 0:56 9 years ago 1 683 Скачать Далее
Payload-aware Trajectory Optimisation for Mobile Multi-robot Manipulation with Tip-Over Avoidance Computational Robotics Lab 3:06 3 weeks ago 1 861 Скачать Далее
Trajectory optimization applied to motion planning of industrial manipulators LaR - Robotics Lab. - UFBA 7:51 2 years ago 146 Скачать Далее
Lecture 15: MIT 6.800/6.843 Robotics Manipulation (Fall 2021) | "Motion Planning Optimization-based" underactuated 1:26:04 Streamed 2 years ago 3 070 Скачать Далее
Whole-Body Trajectory Optimization for Robot Multimodal Locomotion Artificial and Mechanical Intelligence 3:14 1 year ago 263 Скачать Далее
Non-prehensile Planar Manipulation via Trajectory Optimization with Complementarity Constraints SLMC-EdinburghUni 2:30 2 years ago 564 Скачать Далее
Robotic manipulator trajectory optimization in MATLAB/Simulink TODAYS TECH 0:09 1 year ago 317 Скачать Далее